Electronics Area – Electrical and Electronics Tutorials and Circuits
Welcome to Electronics Area
Electrical and Electronics Tutorials and Circuits
Recent posts
Autotransformer
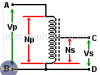
Autotransformer. How does it work? . Step-up, step-down. Applications. Advantages. Conventional transformer connected as an autotransformer.
Transformer Turn Ratio (K)

3 ways to find the transformer turn ratio K. Using the winding number of turns, using electromotive forces, and using winding currents. The ideal transformer and the transformer turn ratio.
Diode Connected in Parallel to a Relay Coil – Relay diode
Purpose of the diode connected in parallel to a relay coil. Characteristics the diode should have. Example of operation: the relay is energized and de-energized.
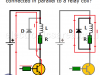
Doorbell for Deaf People Circuit using LEDs
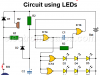
Why use a doorbell for deaf people? A visual warning signal for a deaf person to know someone is knocking at the door. How the circuit works. List of parts.
Dielectric Constant & Capacitors (Table)

What is the Dielectric constant / Relative Permittivity? The dielectric constant is the ratio of the permittivity of a substance to the permittivity of free space. It is a dimensionless physical constant
Binary Number System – Decimal to Binary & vice versa – Videos
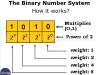
The binary number system only needs two (2) digits: “0” and “1”. How to make the decimal to binary and binary to decimal conversion.
MOSFET Transistors – NMOS, PMOS

MOSFET transistors, or Metal Oxide-Semiconductor (MOS), are field effect devices that use the electric field to create a conduction channel. MOSFET transistors are more important than JFETs because almost all integrated circuits are built with MOS technology.
LM317 Variable Voltage Regulator Tutorial
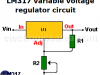
LM317 characteristics. How the voltage regulator circuit works: Regulator circuit operation improvement
Adding a Tweeter to a Speaker
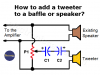
How to add a tweeter to a speaker. Very simple circuit, using only one potentiometer and two capacitors, very easy to install.
5 to 30 Minute Timer Circuit using 7555 IC
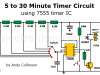
This 5 to 30-minute timer circuit achieves times ranging from 5–30 minutes using the 7555 integrated circuit (CMOS version of the popular 555 timer).
Coulomb’s Law – Electrostatic Force – Formula – Example

Coulomb’s Law—Electrostatic Force: Formula and example. Learn how to calculate the electrostatic force between 2 electric charges using Coulomb’s Law.
Structure of Matter: The Bohr Atom and the Electricity

Structure of Matter: The Bohr Atom and Electricity. The atom, the electron. Positive and negative ions. How free valence electrons become electricity